-

深圳融合永道科技有限公司
主营:AI视频分析识别算法,AIBox视频分析边缘计算盒子,国产化AI视频分析一体机 - 18038008686

深圳融合永道科技有限公司
主营:AI视频分析识别算法,AIBox视频分析边缘计算盒子,国产化AI视频分析一体机 18
18
深圳融合永道车辆交通违章自动抓拍系统概述:
为了进一步加强对机动车的安全管理,提高机动车道路秩序性和安全性,减少违章行为和有效路况视频探测,
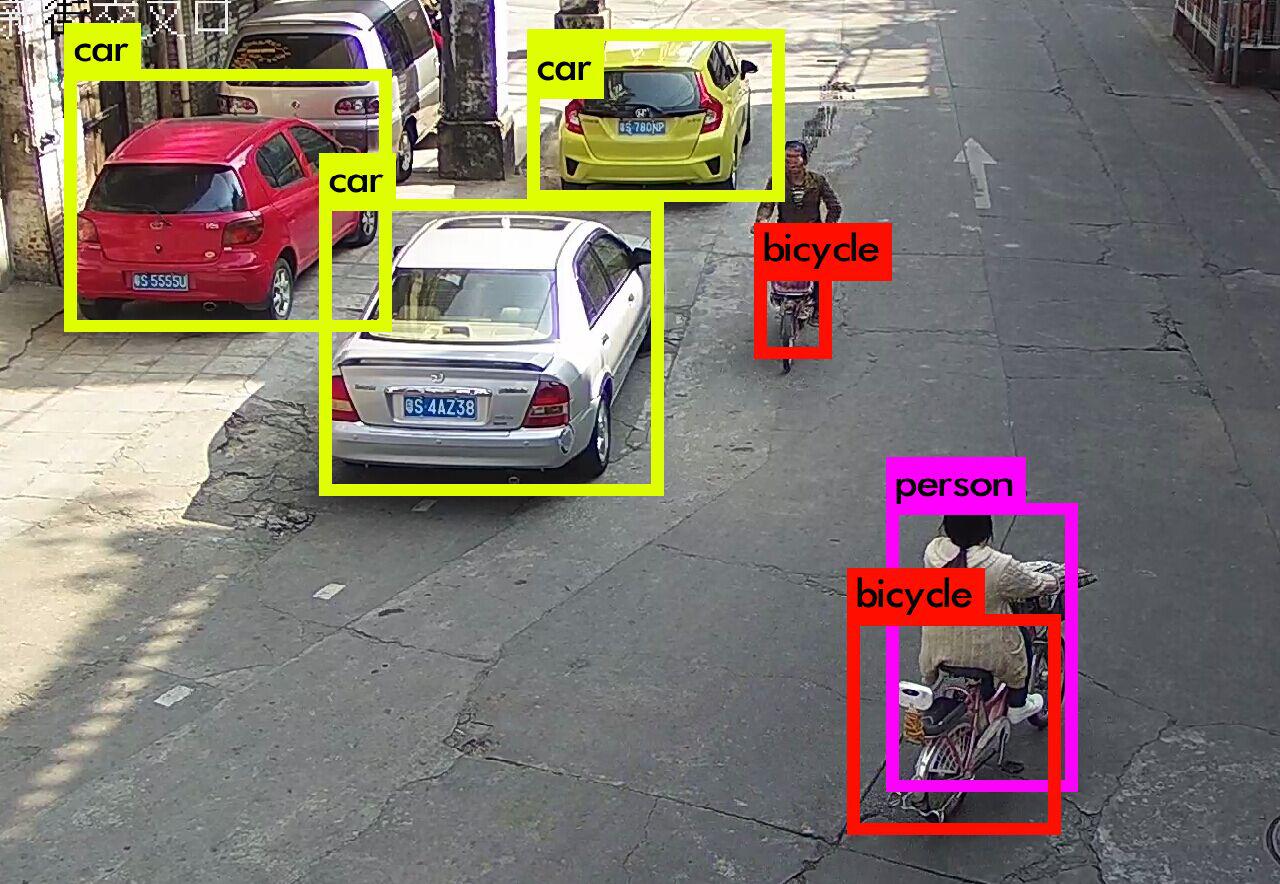
我公司利用人工智能领域机器视觉深度学习技术,成功研发了新一代全自动车辆违章抓拍系统,实现无误报、无漏报的精确自动探测与抓拍。
融合永道车辆违章自动抓拍系统由前端高清网络摄像机采集视频,计算机网络传输系统,违章行为智能分析服务器,综合管理平台组成。
深圳融合永道车辆交通违章自动抓拍系统组成:
1.视频采集系统
由星光级高清摄像机完成视频图像的采集工作,并通过网络将图像上传到智能分析服务器,智能分析服务器受综合管理平堆叠管理。
2.网络传输系统
组建千兆带宽以上的局域网。主要是对视频图像的数字化传输或平台数据访问传输。
3. 违章行为智能分析系统
系统建立多台智能分析服务器,设计逆行、违章停车、违变章线、不按导向车道行驶、违反禁止标线、打电话、不系安全带、**速、拥堵预警等规则,
自动过滤行人、非机动车、骑车、动物等非机动车对象,实现自动违章抓拍,并做到零误报、零漏报。
本子系统采用了GPU高速并发运算,实现高端 、**高清的分辨率实战化应用。
4.综合管理平台
综合管理平台负责堆叠接入多个违章行为智能分析系统,实现大规模联网管理应用,多用户协同应用。
?
深圳融合永道车辆交通违章自动抓拍系统的功能和特点:
1.逆行检测
采用系统内置的拌AB线规则建立逆行检测功能,在规则中画A、B两条虚拟线条,设置A-->B或B-->A为逆行方向,
设置适用对象为相关类型的机动车(小汽车、货车、公共汽车),当行驶车辆依次通过并符合设置的方向时,触发抓拍事件。
支持抓拍后识别车牌号码,并是否转换为报警事件发送到综合平台接警客户端。
2.违停检测
采用系统内置的对象滞留规则建立车辆违停检测功能,在规则中绘制一个或多个检测区域,设置适用对象为相关类型的机动车(小汽车、货车、公共汽车)
和车辆进入区域停留的时间(秒)阀值,当**过阀值时触发抓拍事件,保存进入A区和B区时的图片,支持选用联动球机转到对应区域的预置位抓拍。
支持抓拍后识别车牌号码,并是否转换为报警事件发送到综合平台接警客户端。
3.不按导向车道行驶检测
采用系统内置的进入AB区域规则建立不按导向车道行驶检测功能,在规则中绘制A、B两个区域,其中A为起始正常区域,B为违章区域,检测如果车辆先进入A,
再进入B时触发抓拍事件,保存进入A区和B区时的图片。支持抓拍后识别车牌号码,并是否转换为报警事件发送到综合平台接警客户端。如十字路口直行车道左转、压双黄线等。
4.**速检测
采用系统内置的拌AB线规则建立**速检测功能,利用车辆拌A线和B线的时间差计算区间车速,**过设置的速度阀值时抓拍。
5.视频录像
单元智能分析服务器,对接入的网络摄像机,可以设置全天候录像,录像带有**时间标签,便于支持通过抓拍事件联动回放相关时间段的录像视频。
6.综合平台客户端功能
操作用户通过综合管理平台客户端登录进入系统,可以进行远程预览、抓拍图片查询下载、统计分析等操作。